代码流程
绕动小球
制作直径为1.5 cm的金属靶球,通过一根短杆悬吊。实验开始前,先在地面上放置一个棋盘位于记录环境的中心,用于对齐坐标系。初始时,将靶球放置远离棋盘,避免遮挡。然后,开启记录,将小球绕大鼠活动空间内遍历2分钟。使用OBS Studio软件采集多视角视频,小球运动轨迹需覆盖需要矫正的空间位置。
重要警告
球的直径会影响标定精度,建议使用直径为1.5 cm的金属靶球。球的运动速度不要太快,否则产生运动模糊,影响标定精度。
代码执行
#!/bin/bash
conda activate mmdet
vfile='/PATH_to_ball/BALL____2024-01-22_14-34-01.mp4'
LILAB_DIR=/home/liying_lab/chenxf/ml-project/LILAB-py/lilab
bash $LILAB_DIR/multiview_scripts_dev/p_calibration.sh $vfile carl
其中 vfile 是 OBS Studio 软件录制的视频文件路径,carl 是相机标定参数。脚本会自动解析视频,并生成标定结果。
常用的相机标定参数包括:
- ana: 大鼠行为间1,相机#A1-#A9
- bob: 大鼠行为间2,相机#B1-#B9,拍摄小桶
- carl: 大鼠行为间2,相机#B10-#B18,拍摄中&大桶
重要警告
请检查正确的相机标定参数,这些标定参数存储了预先"标定的内参"。每套多相机系统的内参有较大区别,请勿混淆,否则会导致标定结果不准确。
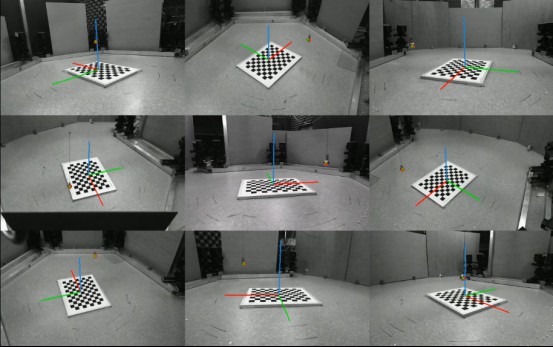
📊 标定结果展示
在生成的 *ball_keypoint.mp4 中查看绿色预测点与小球的吻合程度。生成的 *.calibpkl 是多相机模型文件,用于后续的3D重建。
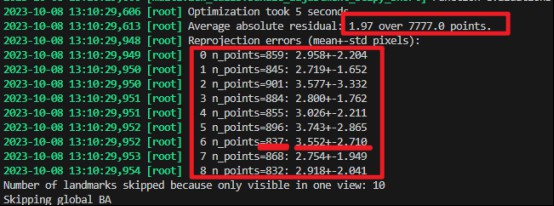
📐 标定的精度评价
查看代码运行的输出。其中 Reprojection errors 是重投影误差,表示预测点与实际点之间的距离。误差越小,标定精度越高。通常允许在 4.0±2.0 像素内。
错误
运行p_calibration.sh时输出error pixel过大,或输出结果视频(*ball_keypoint.mp4)中绿点无法正确跟随小球,说明校正不精确。这往往是 2D 识别小球有很大偏差。需要重新打标,见数据集制作&模型更新章节。